

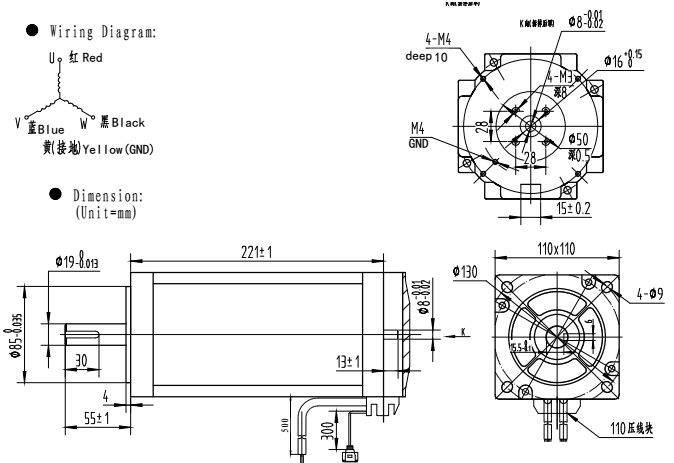
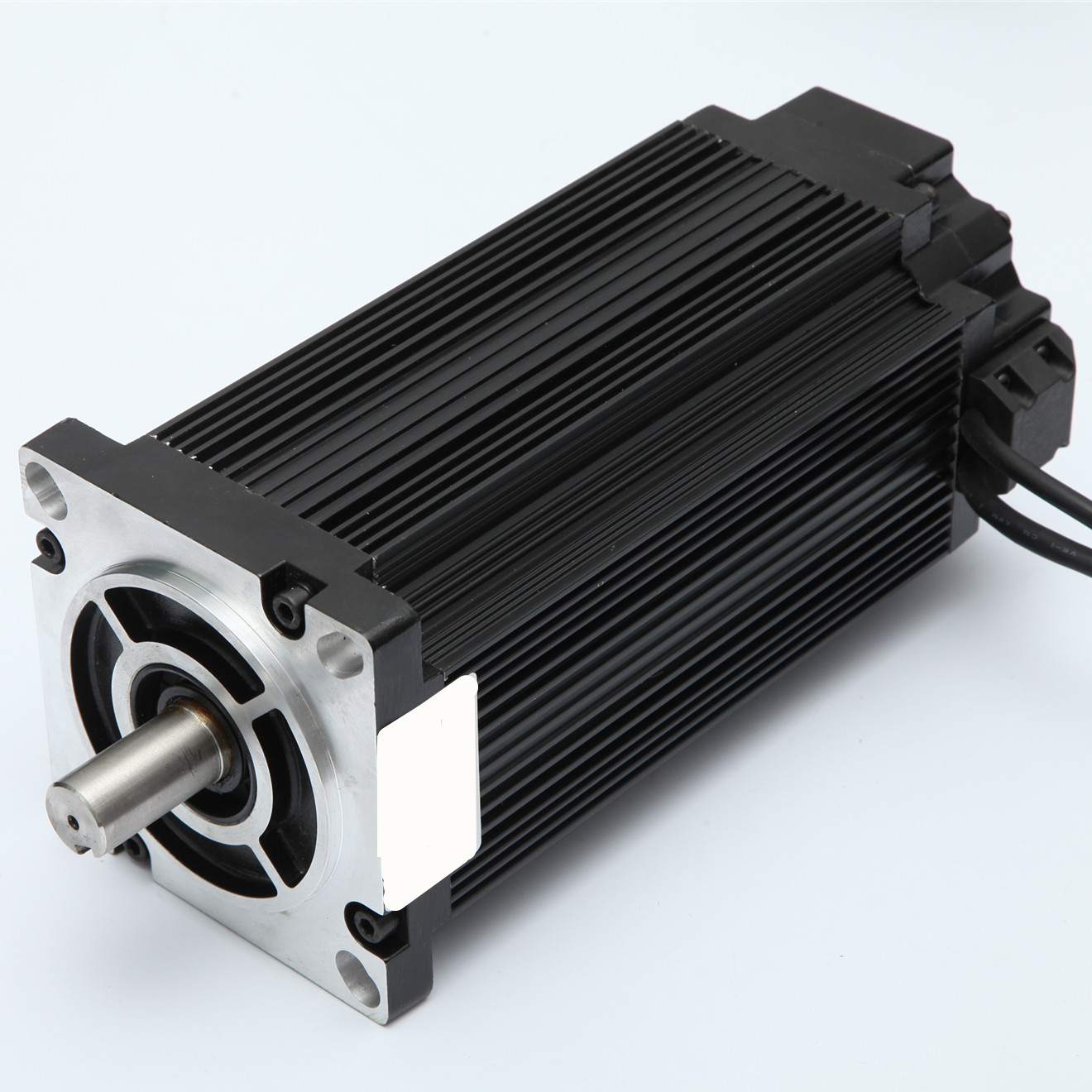
Motor loop tertutup 110mm Motor stepper torsi besar 220V 20Nm dengan tampilan led
Seri Servo Mudah NEMA42 (seri Loop Tertutup NEMA42)
Parameter Listrik Motor:
| Mode | Sudut langkah | Saat ini (A) | Resistensi (Ω±10%) | Induktansi (mH±20%) | Menahan torsi (Nm) | Panjang motor (mm) | Pembuat enkode Resolusi (PPR) | Pengemudi yang Berlaku |
| 110HCE12N-B39 | 1,2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1,2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
Dimensi motorik: mm
Pengemudi 3HSS2260
Fitur
1, DSP 32-bit dan teknologi kontrol loop tertutup vektor
2, Tanpa kehilangan langkah, akurasi posisi tinggi
3, Tingkatkan torsi keluaran motor dan kecepatan kerja
4, teknologi kontrol arus variabel, menahan kenaikan suhu motor
5, Beradaptasi dengan berbagai kondisi beban mekanis (termasuk katrol dengan kekakuan rendah), no
perlu menyesuaikan parameter penguatan
6, Pergerakan halus dan andal, getaran rendah, peningkatan besar dalam akselerasi dan
mengurangi kecepatan
7, Kemampuan kecepatan nol statis tanpa getaran
8, Beradaptasi dengan motor servo hibrida 3 fase 86 (NEMA34) dan 110 (NEMA 42)
9, Frekuensi langkah-pulsa maksimum 200KHZ
10, Langkah mikro 400-60000 pulsa/putaran
11, rentang tegangan AC150-240V
12, Perlindungan arus berlebih, tegangan berlebih, dan posisi berlebih
13, Enam tampilan tabung digital, mudah untuk mengatur parameter dan memantau pengoperasian motor
negara
Pemilihan langkah mikro:
| Kode | Definisi | Jangkauan | Nilai Bawaan | Komentar |
| PA0 | Nomor Versi | 501 | Dilarang Memodifikasi | |
| PA1 | Pemilihan Mode Kontrol | 0~2 | 0 | |
| PA2 | Pemilihan Tipe Motor | 0~2 | 0 | |
| PA3 | Nyalakan Layar | 0~7 | 0 | |
| PA4 | Loop Saat Ini Kp | 0~1000 | 200 | Dilarang Memodifikasi |
| PA5 | Lingkaran Saat Ini Ki | 0~1000 | 300 | Dilarang Memodifikasi |
| PA6 | Posisi Loop Kp | 0~1000 | 300 | |
| PA7 | Pengaturan Langkah Mikro | 400~60000 | 4000 | |
| PA8 | Resolusi Encoder (1000) | 4000 | Dilarang Memodifikasi | |
| PA9 | Resolusi Encoder (1000) | 40~30000 | 1000 | |
| PA10 | Memegang Arus | 10~100 | 40 | |
| PA11 | Arus Loop Tertutup | 10~100 | 100 | |
| PA12 | Reservasi | |||
| PA13 | Reservasi | |||
| PA14 | Aktifkan Tingkat | 0/1 | 0 | |
| PA15 | Tingkat Alarm | 0/1 | 0 | |
| PA16 | Pemilihan Mode Pulsa | 0/1 | 0 | |
| PA17 | Tepi Pulsa | 0/1 | 0 | |
| PA18 | Arah Putaran Motor | 0/1 | 0 | |
| PA19 | Kecepatan JOG | 1~200 | 60 | |
| PA20 | Bagian Mode PEND | 0/1 | 0 | |
| PA21 | Tingkat PEN | 0/1 | 0 |
Dimensi pengemudi (mm):
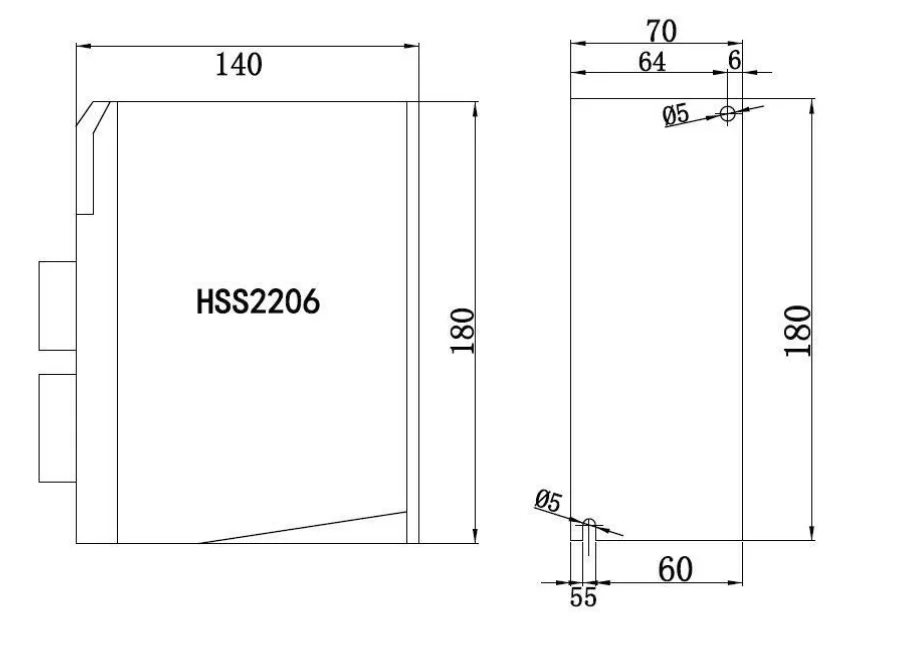
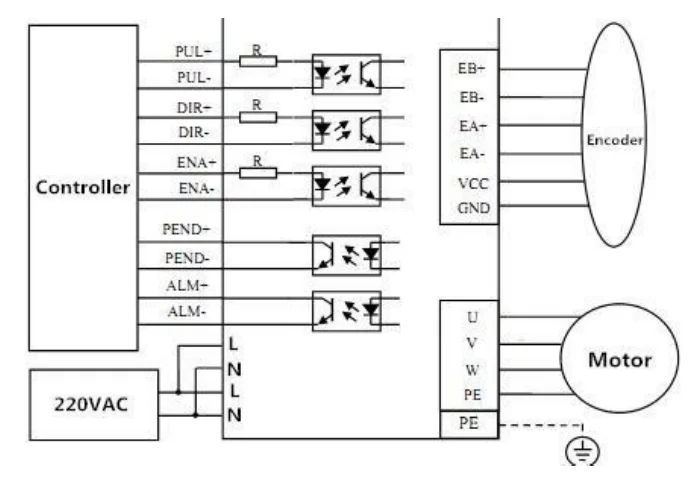
Diagram pengkabelan:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
